快捷导航
上海总部:上海市 普陀区 怒江北路598号 红星世贸大厦B栋1206室
邮编:200333
总机:021-61243616
传真:021-61243616*819
业务邮箱:
sales@hmelectronics.com.cn
邮编:200333
总机:021-61243616
传真:021-61243616*819
业务邮箱:
sales@hmelectronics.com.cn
资讯文章
无换商器电机驱动系统和异步电机驱动系统
无换商器电机驱动系统和异步电机驱动系统
在电动汽车和小型电动车辆上,无换向器电机驱动方案被普遍采纳,而且大量采用永磁方案,以提高整体效率和简化控制方案。小型车上可采用两相方案,大型车上多采用三相方案。为了减小换相时的电流冲击,电机可设计成梯形波电动势。图14-10为无换向器电机驱动系统框图,每一周期内,每个器件的最大导电时间可为120°,每只管的导通与否,由转子位置检测器决定,为实现调速,通常采用PWM控制方式,为了减小开关损耗,可采用单边PWM调制,即上桥臂的管子作为120°的导通开关,而对下桥臂的管子进行PWM控制。
异步电机驱动系统
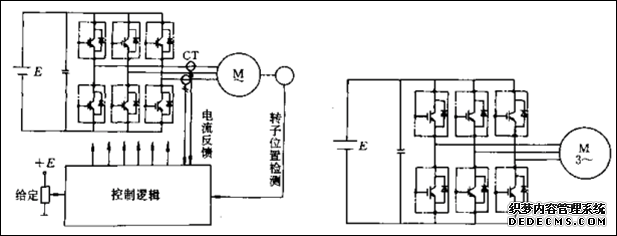
图14-10无换向器电机控制系统图 图14-11异步电机驱动主电路
用于电动汽车的异步电机都是笼型转子的,所以都采用三相逆变器驱动方式,开关器件基本上全采用主电路如图14-11所示。其结构形式与无换向器电机的驱动器完全一样,只是控制方式不同而已。普通异步电机起动时电流很大,而起动转矩并不大,这种特性应用于电动汽车是不理想的,为了要使起动转矩大,而起动电流不能很大,需用矢量控制或直接转矩控制的方式。
目前电动汽车驱动装置已毫无例外地使用IGBT,有的驱动装置同时又是充电装置,具有双重功能。
(文/上海合美电子科技有限公司)
主营产品:三菱功率模块、Concept驱动、EV/HEV功率器件、SVG方案、光伏逆变器、三菱NewMPD、三菱电能质量、IGBT变频、三菱机车模块